在自动驾驶技术日新月异的今天,一项突破性进展正将我们从辅助驾驶的“现在”加速推向全无人驾驶的“未来”。全球首个融合多视图感知、未来预测与实时规划于一体的自动驾驶世界模型正式亮相,标志着自动化控制系统开发与集成迈入了全新的智能阶段。这一模型的诞生,不仅是技术上的重大跨越,更是重构未来交通生态的核心引擎。
传统自动驾驶系统往往依赖于模块化设计:感知模块识别环境,预测模块推断他车行人意图,规划模块计算自身路径,最后交由控制系统执行。这种串联式架构在应对极端复杂、动态变化的真实世界时,常面临信息滞后、决策割裂的挑战。而新提出的“多视图预测-规划世界模型”则从根本上改变了这一范式。它如同为自动驾驶汽车装上了一颗能够进行“情景推演”和“因果思考”的大脑。
核心突破:从“看到”到“预见”与“规划”的统一
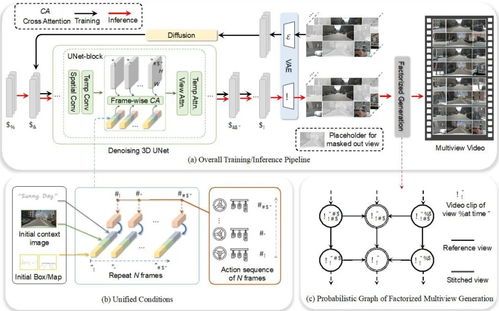
该模型的核心创新在于其“多视图预测”与“端到端规划”的深度融合。
- 多视图感知与重建:模型不再单一依赖摄像头或激光雷达,而是深度融合车辆周身多传感器(如多个摄像头、激光雷达、毫米波雷达)的数据,实时构建一个包含几何、语义、动态物体信息的稠密3D场景表征。这个统一的“世界视图”为后续步骤提供了坚实的基础。
- 概率化未来推演:这是模型最关键的“预测”部分。基于当前及历史的世界状态,模型能够以概率形式,自主推演未来数秒内场景中所有动态元素(其他车辆、行人、骑行者等)可能发生的多种演变轨迹。它不仅能预测“最可能”的还能理解各种“可能但不确定”的未来分支,从而量化感知不确定性带来的风险。
- 基于模型的实时规划:传统的规划器像是在一张静态地图上找路。而新模型则将自身对未来的推演直接作为规划空间。规划模块在由预测模块生成的多种未来“情景剧本”中进行搜索和评估,直接输出既安全(避免所有不良未来分支)、又舒适高效的最优控制序列(如转向、加速、制动)。这种“规划-预测”闭环,使得车辆能够提前为潜在风险做出预案,实现类似人类的防御性驾驶。
对自动化控制系统开发与集成的深远影响
这一世界模型的出现,为整个自动化控制系统的开发与集成带来了范式转变:
- 开发流程的变革:从传统的“感知-预测-规划-控制”分模块独立开发与调试,转向以“世界模型”为核心的统一、联合优化开发。这要求算法、软件与硬件(尤其是高性能计算平台)的深度协同设计,也催生了新的仿真测试需求——需要在海量、长尾的复杂交互场景中验证模型的推演与决策能力。
- 系统集成的简化与强化:模型提供了一个统一的、高层次的场景理解与决策接口,有望简化下游控制系统的集成难度。控制系统的任务从处理大量原始感知数据并应对突发状况,转变为更精准地执行一个经过深思熟虑的、已考虑未来不确定性的规划指令,从而提升了整个系统的稳定性和可靠性。
- 安全边界的重新定义:通过概率化推演,系统能够主动识别并量化“边缘案例”的风险,使安全设计从“应对已发生事件”前移到“预防可能发生事件”。这为构建可证明安全性的自动驾驶系统提供了新的理论和技术路径。
- 推动车路云协同:一个强大的车载世界模型,可以作为车路云一体化系统中的智能节点。它不仅能处理本地信息,未来还能更好地融合来自路侧设施(如智慧路口)和其他车辆(V2X通信)的预测与规划信息,实现群体智能和全局交通优化。
挑战与未来展望
尽管前景广阔,这一世界模型走向大规模应用仍面临挑战:对计算资源的巨大需求、长尾场景下推演准确性的保证、以及如何确保模型决策的可解释性与可监管性。
毋庸置疑的是,“多视图预测-规划自动驾驶世界模型”为我们清晰地勾勒出一条驶向未来的技术路径。它将自动驾驶的核心从“反应式的自动化”推向“预见性的自主智能”,不仅是单车智能的跃升,更是构建高效、安全、和谐未来交通网络的关键基石。随着自动化控制系统围绕此类先进模型不断深化开发与集成,人类距离那个汽车真正拥有“世界常识”并自主、可靠穿梭于街巷的又近了一大步。